2023中国汽车与出行未来峰会 | 朱西产:智能产品对传统产品是替代关系

分享主题演讲:L2+/L3智能汽车的产品形态及安全风险控制。

以下为发言实录:
非常高兴能够到美丽的海南来参加这场汽车盛会。我想探讨一个话题——汽车的智能化。
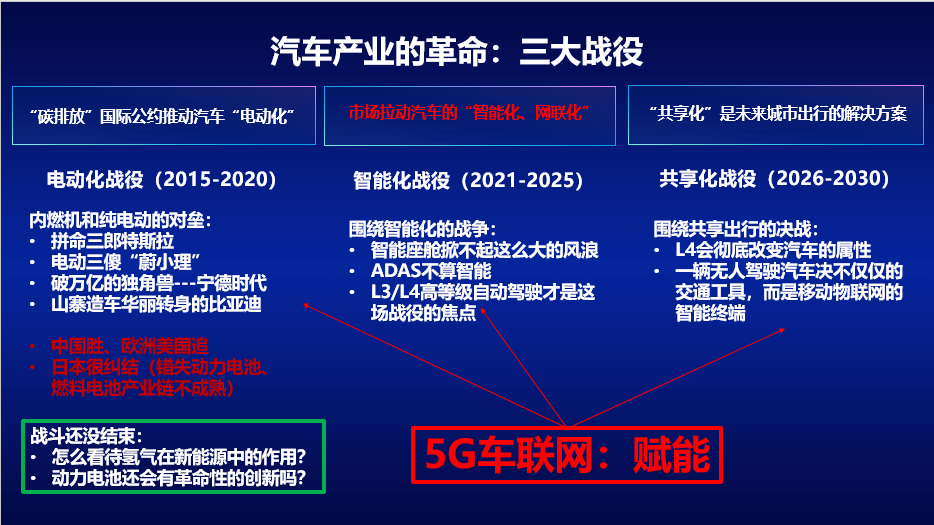
一、汽车的三大战役
汽车产业进入到了快速的技术发展期,过去五年我们已经看到了电动化这场战役。五年前我们是怀疑的,但是到今年,我觉得汽车电动化这件事情已经是坚定不移了。从去年我们说汽车电动化之后,第二场革命又来了,就是智能化。
智能化要改变的是一辆车的电子构架,我们说的“软件定义汽车”不是现在的嵌入式电子构架,而是域控制器(电子架构)。由于芯片的发展,整个汽车的电子电气构架发生改变,实现软件定义汽车。一辆软件汽车靠过去的方法是开发不出来的,它是迭代出来的,现在汽车跟手机一样,要用软件刷一刷,已经成为共识了。
这场战役打完,我们要改变的不是一辆车,我们真正想改变的是出行。像北上广深这样的城市,所有的车都实现了自动驾驶,这么多私家车,我估计道路还得拥堵,停车位还是找不到,真正来说等到自动驾驶实现以后,我们自动驾驶还有一仗。上汽有享道出行,吉利有曹操出行,还有T3出行,我相信这些出行(公司)目前都是亏本状态,但是不敢不做。
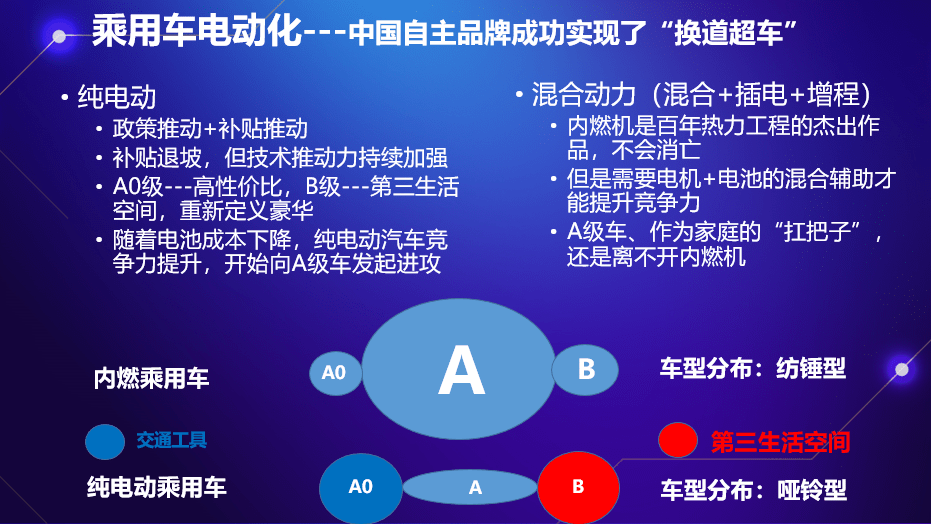
电动化这个已经看清楚了,应该是多种能源结构百花齐放,他们互相之间是一种并存和竞争的关系。内燃机会不会消灭?作为一个百年工程方面的奇迹、一个产品,我觉得内燃机不会消灭,它有它存在的必然性,但是纯内燃机可能活不下去,所以这是竞争关系。乘用车的电动化我们已经看到,纯电动、混合动力有可能到2025年左右三分天下,就是BEV、PHEV和HEV三分天下,尤其从2023年新能源汽车政策退坡之后,HEV会上来。2022年其实是PHEV,尤其是新型PHEV的一个快速增长年,从2021年BEV就已经进入到了快速发展阶段,我相信2023年是HEV的快速成长阶段,所以有可能最后车用动力成为BEV、PHEV(把增程放在PHEV里)、HEV三分天下这样一种关系。
二、智能汽车软硬件发展
传统汽车是嵌入式电子构架,ECU已经多到六七十个,价格也不便宜,形不成像样的软件,谈不上智能化。智能汽车我们从用户角度来说,表现为三个方向:智能座舱、智能服务和自动驾驶。
智能硬件智能为王,软件AI算法为王,智能化和自动化最大的差别是智能化由数据驱动。所以从产业的核心角度来说,一辆智能汽车它的核心是芯片、AI和数据。汽车正在成长为第三生活空间,有了20度以上的电,这个车就可以成长为第三空间,再加上智能化,汽车的服务能力会更强。
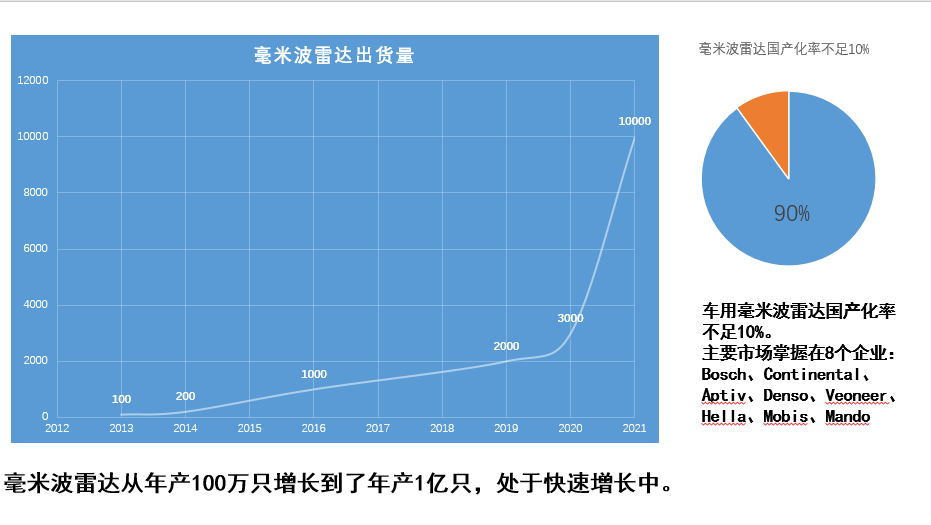
我们对一辆智能车最大的愿望还是能够实现自动驾驶,尤其是在交通事故发生的时候。ADAS是已经量产的智能功能之一。ADAS系统是以毫米波雷达为王的,全世界第一台装了毫米波雷达(的车辆诞生于)1959年,到2003年达到500万辆,到去年毫米波(雷达)出货量达到一亿只。现在这个车如果没有一个毫米波雷达,没有摄像头,连五星安全都做不到。对于乘用车来说连五星安全都拿不到,谁会买?
从今年开始,欧盟ECER152将逐渐把ADAS的这些安全功能变成强制法规,在强制法规推动下,全球一年的年产量到九千多万辆,一辆车如果三只毫米波雷达,一亿只毫米波雷达是不够的,(需要)两亿到三亿支毫米波雷达。
毫米波雷达是智能汽车必备的一个环境感知传感器,当然智能摄像头在ADAS里面是(以)毫米波雷达为王的。毫米波雷达在中国的发展还有巨大的空间,目前在中国市场,毫米波雷达国产化率不到10%。毫米波雷达全球98%左右的市场是被八个公司垄断着,这里面叫做ABCD,尤其是B博世和C(Continental)两家就占了全球市场的一半,这个部分涉及到射频芯片的联盟的垄断问题,当然中国现在在努力攻克芯片,我相信随着国产射频芯片的发展,毫米波雷达国产化率有可能上升。
L3级人机共驾,这样的功能为什么现在敢想象?高算力的AI芯片的出现,使得高清摄像头成为主环境传感器,除了纯视觉(方案)的特斯拉之外,所有汽车今年开发的平台大概都搭载了1到2只(激光雷达),像极狐搭载了3只激光雷达,激光雷达也进入了量产的阶段。
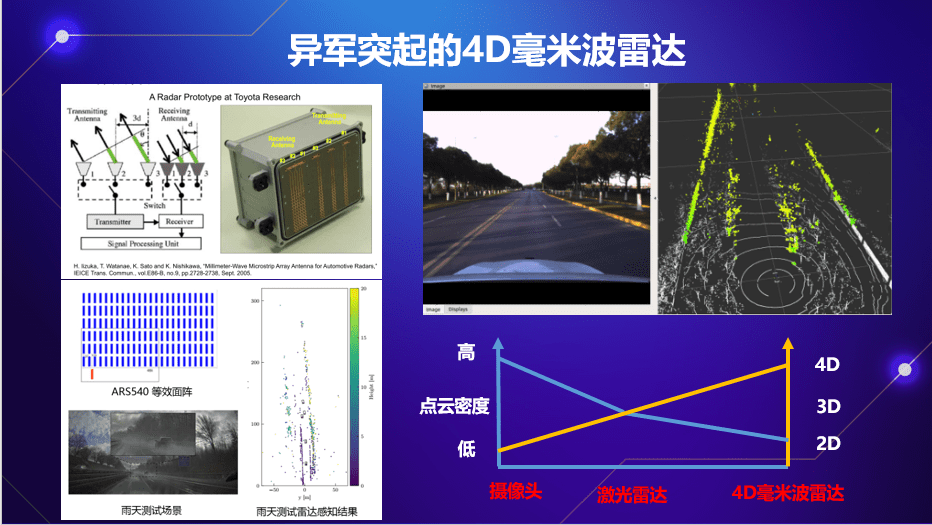
去年又兴起了4D雷达。特斯拉又重新捡回了毫米波雷达,在捡回来的毫米波雷达不是传统的,而是4D毫米波雷达。这是我们去年采集的数据,右侧的图像白点是一个机械扫描的机械雷达,彩色的点就是4D毫米波雷达,它不仅有这个点的3D空间信息,还有相对速度。所以4D毫米波雷达比激光雷达还是多一些信息的。
三、智能驾驶安全
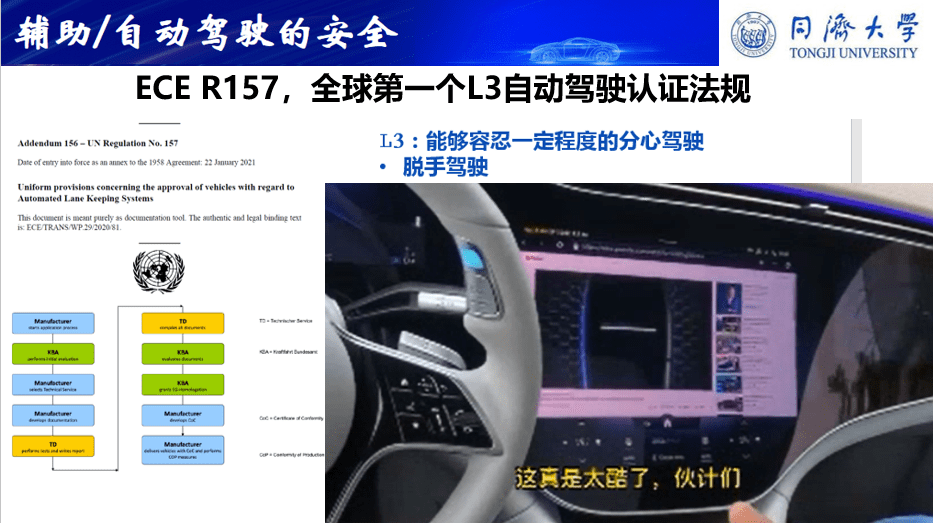
驾驶员真的需要智能驾驶吗?人机共驾的驾驶能实现吗?我相信人们对于技术的追求是永恒的。ECE R157,欧盟第一个针对L3的法规已经出来了。2021年这个法规出来,2022年第一辆已经通过认证的车也出来了——奔驰EQS。奔驰其实以燃油车为主,但有意思的是,智能和电动真的是亲哥俩,奔驰的这辆自动驾驶汽车是搭载在奔驰汽车销售并不是太好的纯电动车型EQS上,这是全球首辆通过了自动驾驶认证(的汽车)。通过了认证以后,你可以看到奔驰的广告就变了,它非常典型的特征是脱手驾驶。
这个功能看上去好像有点八卦,但是我们知道八卦的东西是有市场基础的。从互联网进来以后,我们能够卖钱的东西何尝不是八卦的东西,汽车想提升正能量的话,我们觉得这些商业运营车辆更需要自动驾驶的支持,毕竟这些商业运营车辆他们的司机每年的工作强度还是非常大的,并且他在开车的时候还要处理很多业务,分心驾驶、疲劳驾驶在所难免,所以这样的自动驾驶还是有用的。
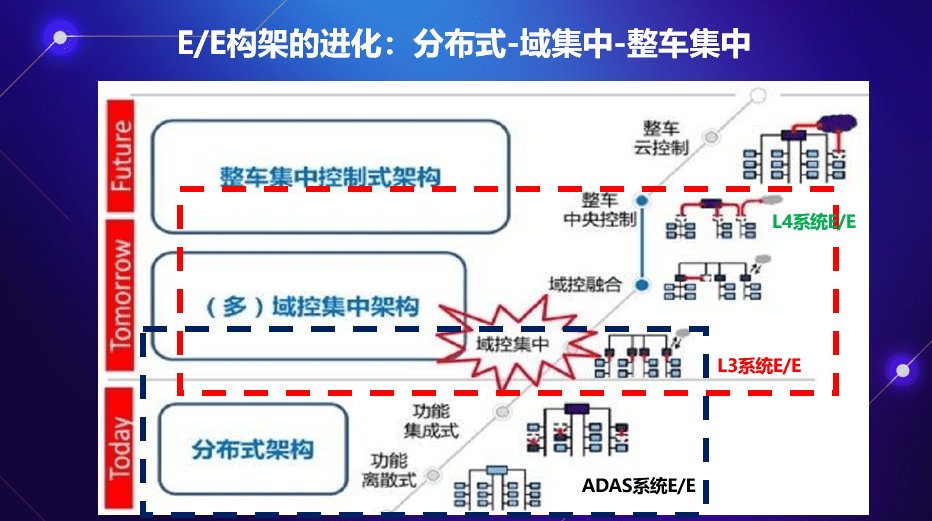
(1)E/E架构进化
这种功能首先是需要整个电子构架发生改变,从嵌入式电子构架向域控制器(发展)。去年我们调研国内新一代的这些车,基本上采用这样的结构,至少两个域控制器:一个智能座舱域控制器,一个智能驾驶域控制器。特斯拉Model3是这样两个域控制器,到ModelY这两个又合在一起,是一个中央集成计算机。这里面就涉及到一个事情,到底几个域控制器是合适的?能不能学特斯拉?它的厉害之处是所有软件自己开发,嵌入式电子构架最大的好处就是让专业的人做专业的事情。现在软件定义汽车,大量软件集中起来,用域控制器中央集成计算机集中起来,开发起来专业分工又怎么办?尤其是底盘,我们知道底盘控制自动系统、转向系统,这个东西都是非常专业的,主机厂自己做得成做不成?
为了平衡软件集中和专业分工,大概率这几年可能会向三个域控制器方向发展,一个座舱域控,一个智能驾驶域控,一个是智能底盘域控。电动化还需要继续往前走,从现在的集中式的电机驱动又逐渐向分布式发展,并且从底盘控制角度,纵向控制的融合就是驱动系统和自动系统的融合,甚至会走向纵向系统和转向系统、纵向和横向的融合,甚至再跟垂直方向,就是主动悬架(融合),实现全融合控制。所以三个域控制器来充分发挥软件功能集中和行业的专业分工来平衡这对矛盾。
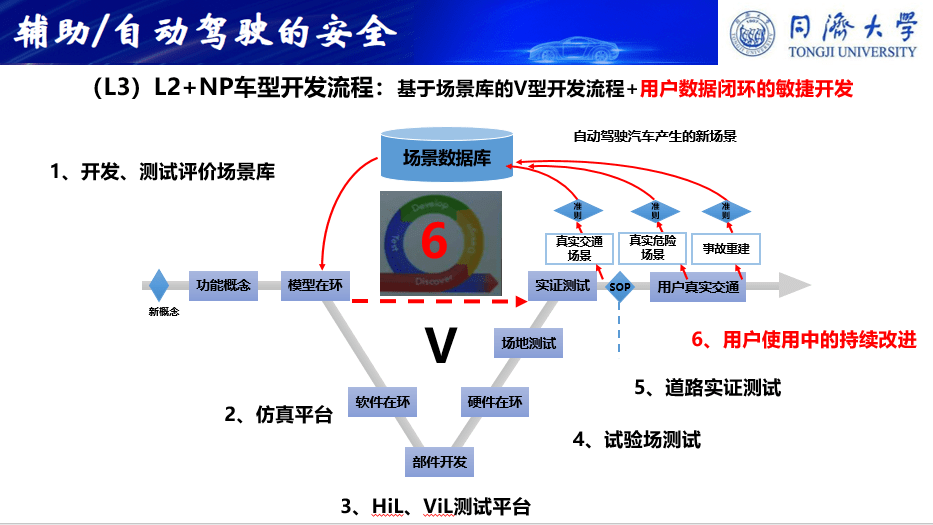
(2)敏捷开发
下一代智能汽车采用域控制器、采用软件定义以后可以迭代,V模型是我们汽车开发的圣经。(但)以后不是,SOP之后仍然还要进行快速的迭代开发,除了V模型开发以外,所有的企业对新一代的智能汽车还要进行敏捷开发,努力做到一年一次更新,像特斯拉已经可以做到一年两次更新、三次更新,我们希望做到一个季度做一个更新,甚至一个月做一个更新。各位的手机已经差不多可以做到一个星期到两个星期做一次更新,这个就取决于敏捷开发。敏捷开发的高效率怎么带来的,就数据。
(3)三大安全
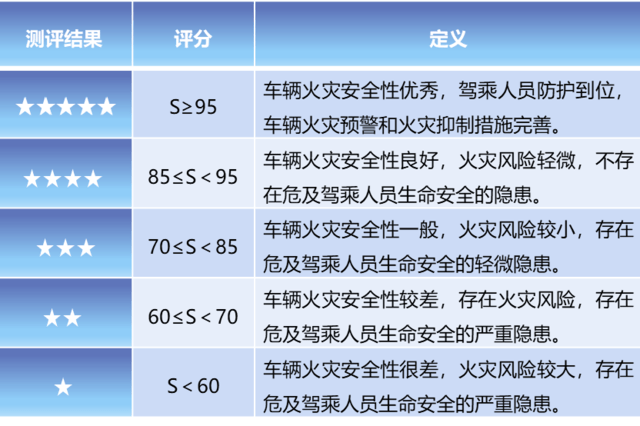
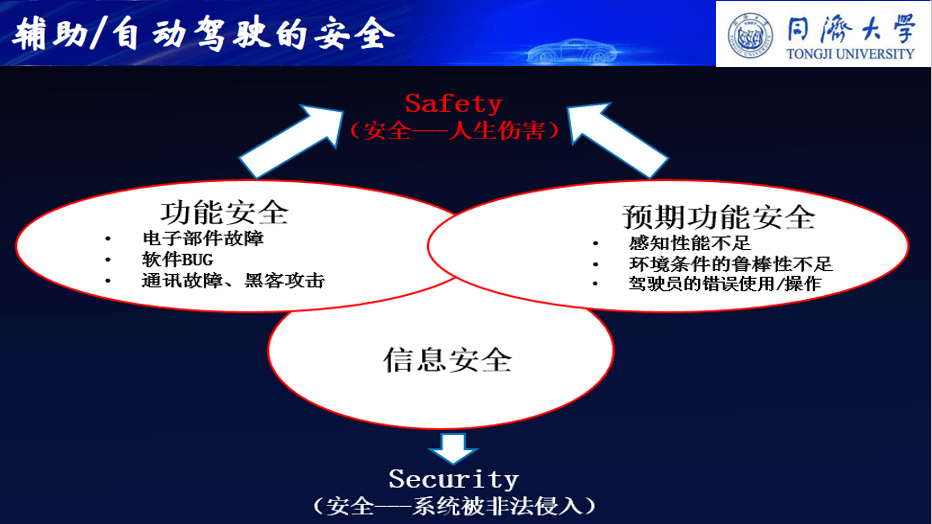
电动汽车也陷入到了恐怖谷,大家对它的安全性仍然是有疑虑的,所以汽车的安全技术除了过去的主动安全、被动安全技术以外,又引入了三个新的安全概念:功能安全、预期功能安全和信息安全。工信部有说得很清楚,智能网联汽车准入的条件是什么——功能安全、预期功能安全和信息安全,这是2022年我们的一些主要的工作,就是如何在预期功能安全的指引下,来完成自动驾驶汽车的认可认证和安全管理。
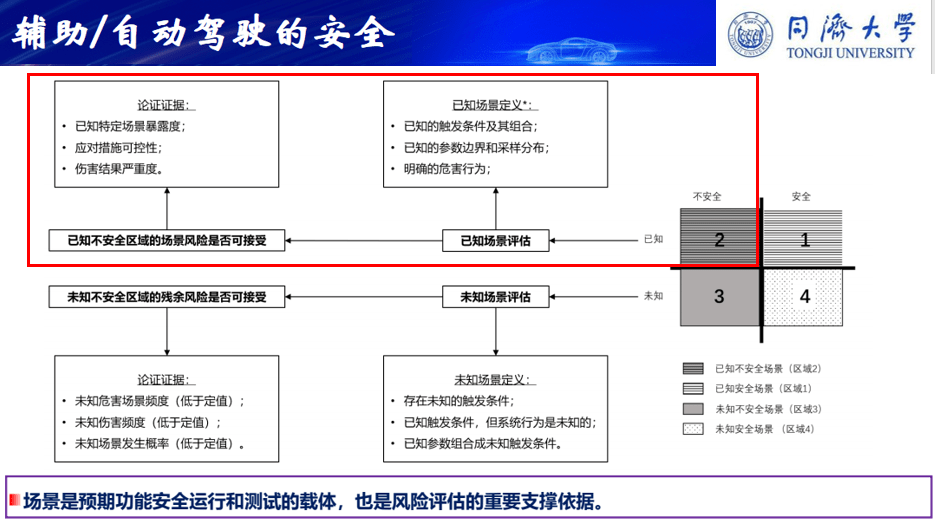
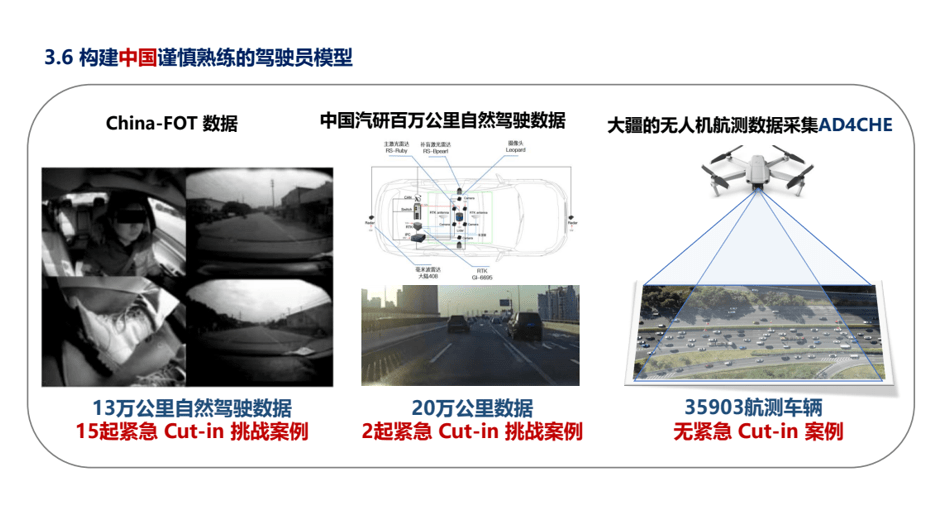
预期功能安全提出了基于场景的一种安全测评,把场景分为了四个象限。安全管理主要针对第二类已知的不安全和第三类未知的不安全。已知的不安全,我们就要把能够想象到的不安全(场景)全部进行测试。我们现在提出的是比人类驾驶员更安全,所以要找到人类驾驶员的这条红线,零事故是做不出来的,既然发生事故,现在这个事故怎么判定,ECL57也做出了规定,把发生事故的数据记录下来,进行对比就可以证明。ECL157提供了一个标准的驾驶员模型,去年我们预期功能安全的安全组对这个标准的驾驶员模型用中国的数据进行了一个分析,行车的数据是由大疆无人机航拍测到的数据,通过对比我们发现,ECL157里面驾驶员模型还是符合中国驾驶员的特征的。
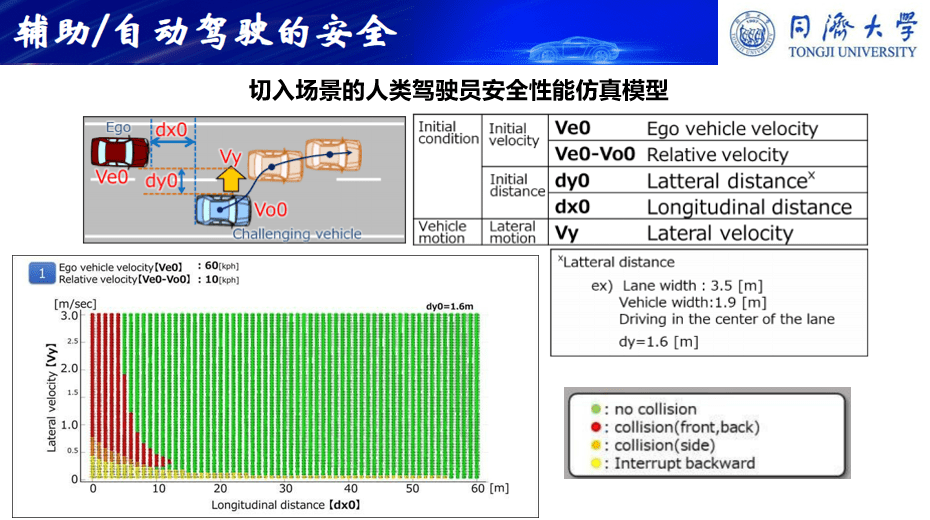
有了驾驶员模型以后,我们用仿真(技术)。比如以切入为例,我们根据前车速度、本车速度和两车之间的距离,这三个参数全覆盖。经过仿真以后,会得到这样一张图,绿色的就是不会发生碰撞的,红色会撞到前车,切入的时候会撞到尾巴,撞侧尾也不行,撞尾巴也不行,所以这张图算出来,要完成一个切入大概可以减到三四千个工况。还是太多,我们还是希望在认证的时候用实车测试能够在一二百个工况,因为认证一定是通过实车测试的,再通过三支柱,就是仿真加上实车测试。怎么能够证明这辆车比人类驾驶员更安全,这是我们认证的一个思路。
(4)数据闭环
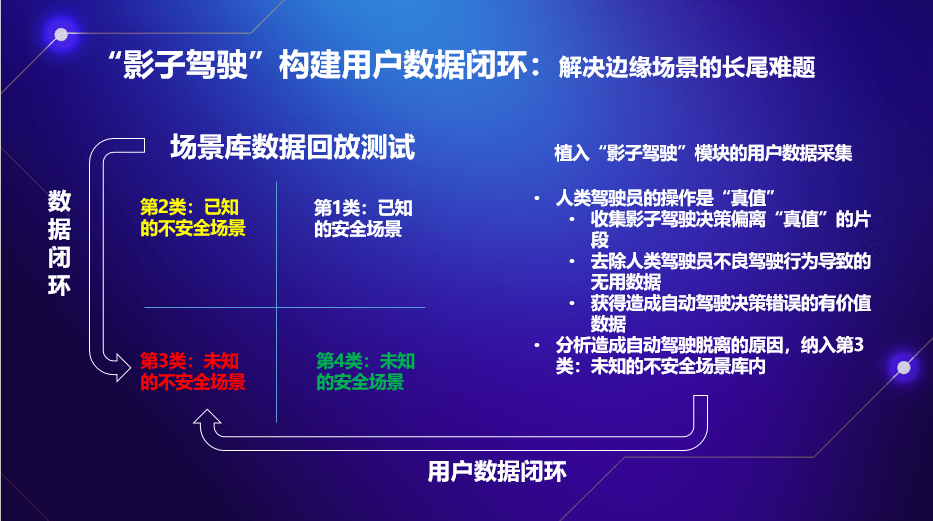
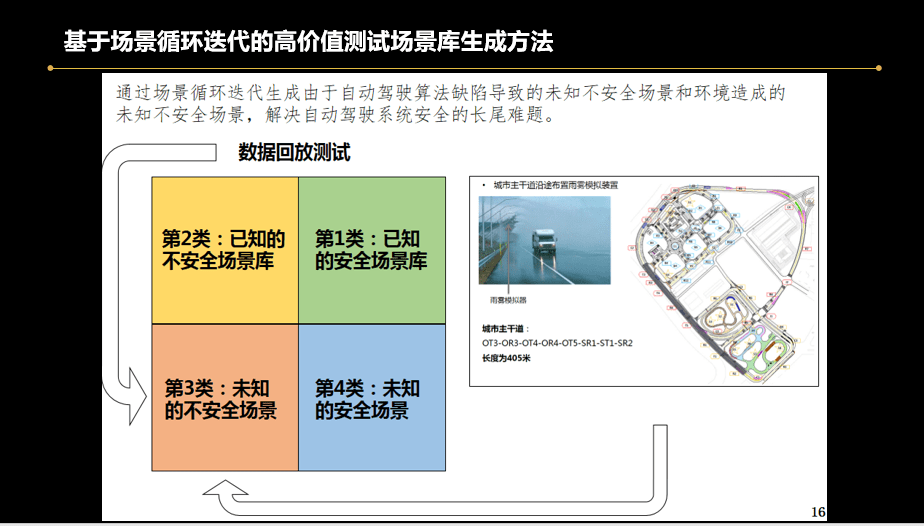
自动驾驶真正的长尾难题是第三类——未知的不安全场景,这个未知在认证过程中是没法进行认证的,我们来看看有哪些未知。
小鹏P7发生的一起事故,要是从场景来说很简单,这不就是一个主车道巡航(事故)吗?但是要命的是前面的车上面放的东西实在太“妖娆”了,它没认出来就撞了,环境感知还存在一些算法上的问题,还是有待提高。特斯拉发生的一起事故,从它的三维鸟瞰图里面可以看到,轻轨它是认出来的,但是特斯拉(车辆)居然要左转。这就是第三个未知的难题,美国打算怎么做?美国打算把所有的自动驾驶汽车都上路。去年发布一个事故报告,这个事故报告其中包含的比较多的,就是在道路上出现的奇形怪状的车,它认不出来,因为摄像头是需要训练的,训练的图库里面不一定见过这个车,你的智能摄像头没见过这个车它就认不出来它是个车。
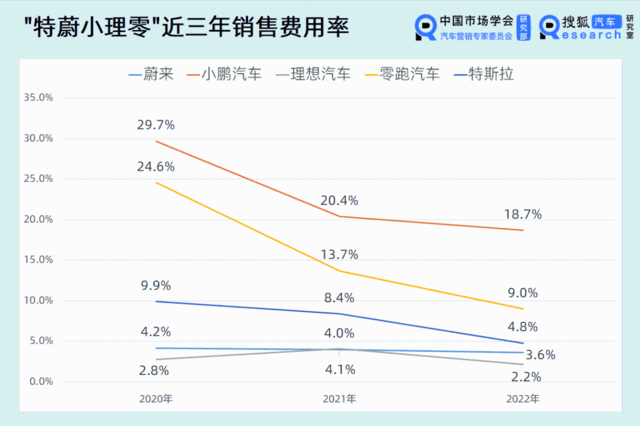
现在各个企业都是这样,努力要建一个数据闭环。要做这个数据闭环,首先智能摄像头的训练就需要数据,所以各个企业基本上都采了100到300万公里(测试数据),这个还是很费钱的,几亿到几十亿。特斯拉是全球唯一一个已经完成了“用户数据闭环”的公司,而国内的企业基本上完成了“数据闭环”,还没有完成“用户数据闭环”。
我们说数据闭环,企业自己采一百万公里,采到三百万公里,这都是可能的,无非就是几十个亿的投入,还是能做到的。但是我们说一辆安全的车要刷到10亿公里、20亿公里,这个可是干不成的,最终还是要建立用户数据闭环。恶劣天气也是一个难题,从美国的事故报告里面来看,一个是奇形怪状的道路交通参与者,第二个就是恶劣天气,这两块都是拦在自动驾驶前面的两个拦路虎,有待我们攻克。
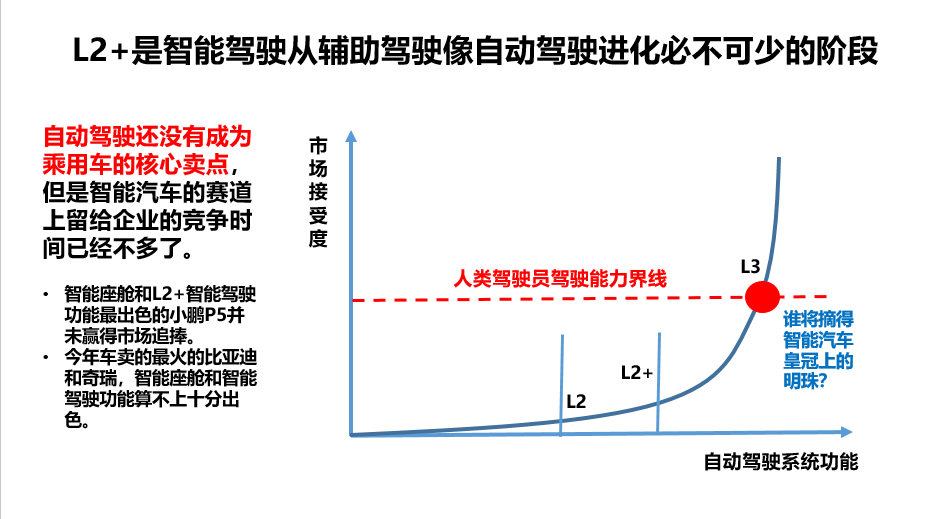
所以现在的L3级的产品我们说是迭代出来的。L2级不行,电子构架改了以后,软件定义汽车以后可以变成L2+,L2+会快速迭代,通过数据闭环,尤其是通过用户数据闭环快速上升。当然大家现在有犹豫,尤其今年美国自动驾驶概念跌落,大家又开始怀疑用户真的需要自动驾驶汽车吗?这跟三年到五年前(情形相似):国家真的推得动电动汽车吗?
今天我们对电动汽车不怀疑了,我们相信三年后再看,智能产品对传统产品,它不是竞争关系,而是替代关系。因为在今天我们说电池不会完全消灭内燃机,但是你口袋里边的智能手机已经完完全全消灭了功能手机,智能汽车也是这样,一旦达到了用户接受度,它是会直线上升,几乎是碾压式的。所以当年苹果干掉诺基亚也就不到一年,当诺基亚感到威胁的时候,不到一年就完全彻底死掉了,这是需要关注的。
既然我们的产品要从L2+走向L3,一方面要帮助工信部推动自动驾驶的标准制定和认证,上个星期中国汽车工程研究院推出了全球第一个L2+产品(测评),我们叫做NP(Navigation Pilot),就是导航智能驾驶的一个测试评价。
中国汽车在打赢了第一场电动化战役之后,三年后,我们希望看到中国再由智能化这一仗带来一个新的汽车科技,感谢大家!