2023中国汽车与出行未来峰会 | 范炬:车联网为智能驾驶提供有效的感知增强

1月5日,第四届(2023)中国汽车与出行未来峰会暨2022-2023创闻号年度大选颁奖典礼于海口举办,主题为“智同道合 价值共创”。当“智能化”成为风向标,汽车产业上下游共创者将如何掌舵新航向、建构新价值?本届峰会旨在总结2022年度最具价值的企业、产品和技术,并探讨2023年汽车产业的黄金赛道。
活动现场,中信科智联科技有限公司总经理助理范炬(线上)分享主题演讲:C-V2X融合ADAS研究。

以下为发言实录:
各位领导,各位嘉宾,大家好,我是中信科智联科技有限公司的范炬,很高兴今天在这里做一个分享。我的报告题目是《C-V2X融合ADAS研究》。
首先介绍一下我们,中国信科集团是由原有的两个央企,大唐电信和烽火集团在2018年整合之后形成的一个新的(公司)。中字头的通信央企。我们在无线通信、光通信领域业内知名,同时我们也是C-V2X车联网原创技术策源地。
中信科智联科技有限公司是集团下属二级公司,前身是集团创新中心。早在10年前,我们就开始进行C-V2X技术的研究,并且在2013年5月17日世界电信日,由我们集团陈山枝总第一次在业内提出了LTE-V2X的概念,并且奠定了C-V2X技术的基本框架。总体来说,我们具备了国内领先的C-V2X产品、方案及服务,也是我们集团车联网产业骨干企业。
围绕C-V2X,我们具有全面的产品、方案及服务。硬件产品包括车规级模组、RSU、OBU、C-V2X融合ADAS OBU等等软件产品,如C-V2X模组软件、ITS协议栈、C-V2X应用软件等,以及丰富的解决方案,包括高速公路、城市道路、智慧园区、智慧出行、行业方案、测试场方案、教育实训等。那么最后还包括像V2X的网规网优等种种服务产品。
下面我们来看一下汽车产业的电动化和智能化的蓬勃发展。今年,中国新能源汽车的市场占有率达到22.9%,而L2级辅助驾驶的渗透率达到了33%。与此同时,网联化的发展也日趋成熟,具备了赋能智能化的条件,无论是在政策出台、标准的演进,还是产业的推进方面。智能化和网联化的融合演进,最终才能实现我们汽车和交通行业的终极目标,也就是高等级的自动驾驶和智慧交通。
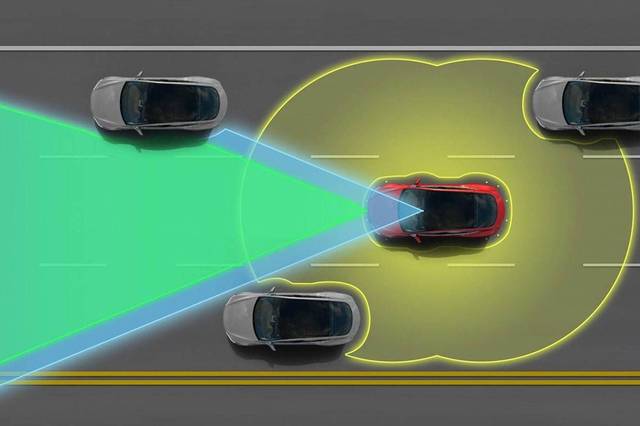
传统的智能驾驶主要依靠单车智能。单车智能确实越来越强大,但是它也有一些先天性的固有缺陷,或者说局限性。比如感知能力受限,它没有办法超视距感知。而且受天气、光线的影响大,在感知范围上缺乏基于上帝视角的道路全局信息。同时,学习算法具有感知长尾效应,在协作能力上没有相应的一个可以相互协同的能力。
而这些局限性,通过C-V2X的车联网技术都可以获得很好的补充和解决。因此,从根本上,单车智能的感知,无论是摄像头还是雷达,本质上是高频的电磁波,所以它只能在视距内感知,而且是被动感知。而C-V2X通信是低频的电磁波,因此可以超视距的全向感知,并且可以通过C-V2X通信实现相互之间的主动协同。因此C-V2X的技术可以让车车/车路“聊”起来。如果说传统的单车智能是用眼睛去看,以及用大脑去分析,那么C-V2X车联网的技术,则增加了听和说的能力,因此,感知的能力大为增强。
那么C-V2X融合ADAS,也就是网联式的ADAS,会带来什么新的优势?
我们以最基本的AEB为例,传统的AEB可能会在如下的方面受到一些局限,比如说天气因素,如大雾、大雨环境因素,比如强光、隧道,以及视距定向感知的局限性,比如说交叉口侧向有阻挡的车辆、匝道汇入车辆、“鬼探头”、小曲率半径的弯道、事故车辆、道路遗撒等静止目标,以及急刹切出等等。此外,传统的AEB无法获知其他车辆的类型、状态、尺寸、刹车、加速度、故障等等信息,而网联式的AEB可以知晓这些信息,比如说在计算AEB的GTC时间的时候,就可以获得更准确的一个结果。
那么我们再以ACC为例,刚才所说的AEB的受限场景仍然适用于ACC,因为存在前车时,ACC的主要功能是与前车保持安全的行驶距离。另外,传统的ACC不识别红绿灯,因此在遇到红灯时需要人工介入刹车,而当红灯变绿的时候也不会自动起步。所以传统的ACC在城市道路中是一个碎片化的体验。而对于网联式的ACC,可以识别红绿灯信号机的状态。因此,当遇到红绿灯时,会计算当前绿灯剩余时间,如果可以通过,那么就以合理的速度平稳通过。如果剩下的时间不足以通过,那么就会自动的减速、停车。在红灯变绿的时候也会自动的起步。这样的话就可以获得一个连续的舒适的ACC的功能。
同样在高速公路上,传统的ACC也容易误识别限速标识,包括在弯道容易丢失跟踪对象,网联式的ACC都可以解决这些问题。那么总体上,网联式的CACC可以赋予自适应巡航更安全、更舒适的通过红绿灯的能力,实现更可靠的自适应巡航,以及对跟踪对象的一个更强的跟踪能力。因此,我们研发了网联式ADAS域控制器。
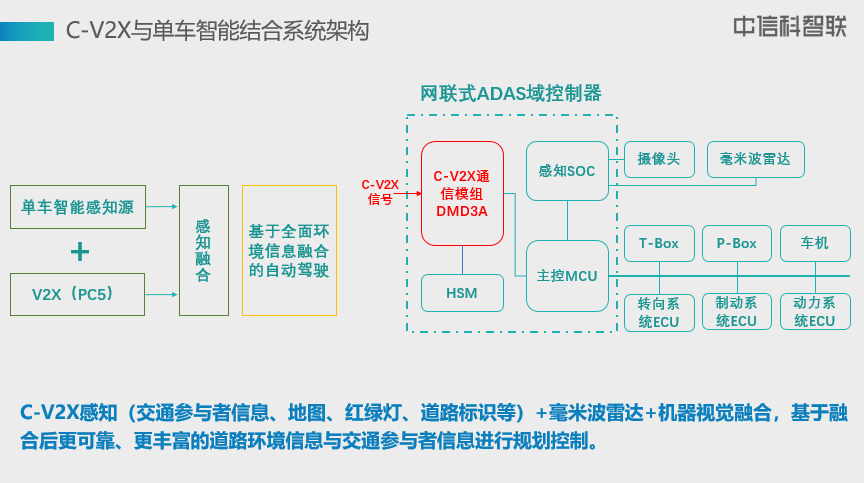
如图所示,绿色虚线框是网联式ADAS域控制器,红框是我们的C-V2X通信模组,它所获得的C-V2X的信号经过处理,输送给主控MCU。同时,传统的单车智能通过摄像头和毫米波雷达等获得的感知信息,也传送给主控MCU,进行感知的融合处理,最终得到的控制结果再输出给转向、制动和动力系统MECU。所以C-V2X的感知可以获得交通参与者信息、地图、红绿灯、道路标识等等丰富的感知结果。那么再加上毫米波雷达和机器视觉的融合,基于这样一个融合之后,更可靠、更丰富的道路环境信息与交通参与者信息就可以进行一个更好的规划控制。
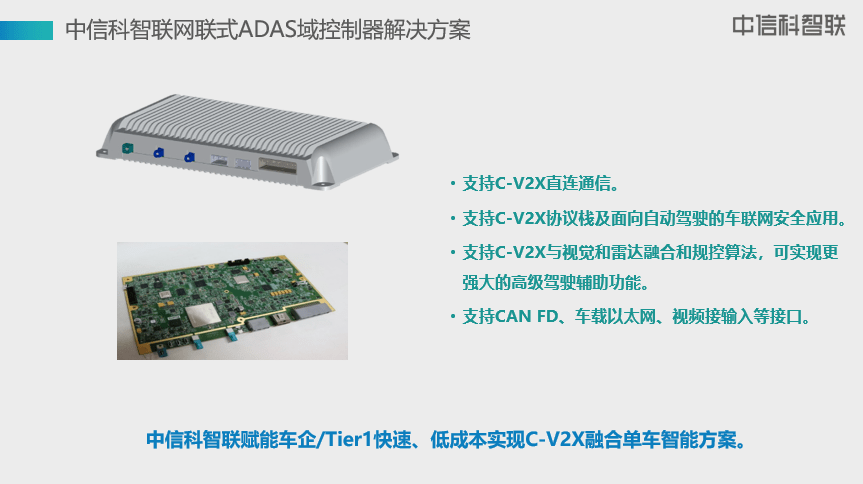
这是我们所研发的网联式ADAS域控制器的实物图,它支持C-V2X直连通信、支持C-V2X的协议栈,以及面向自动驾驶的C-V2X车联网安全应用,也支持C-V2X与视觉和雷达融合的规控算法,从而可以实现更强大的ADAS的功能。那么通过这样的方案,我们也希望能够赋能车企和Tier1快速、低成本地实现C-V2X融合单车智能的方案。
最后做一个简单的小结。
从C-V2X融合ADAS的必要性上,车联网作为具备主动性、非视距能力的感知技术,可以实现车车和车路协同,所以它可以为智能驾驶提供有效的感知的增强,包括补充、冗余和强化。我们中信科智联完成了网联式ADAS方案,可以实现基于传统AEB、ACC增强的CAEB和CACC功能。CAEB支持传统AEB的受限的场景,比如说横向车辆切入、前车急刹切出、“鬼探头”、十字路口建筑物遮挡,雨雾天气等等,而CACC可以支持传统ACC的受限场景,如绿波测速通过的交叉路口和红绿灯自动启停等等。
对于未来的展望,我们认为网联和智能深度融合是智能网联汽车的核心要义,也是大势所趋和必由之路。两者深度融合使得智能驾驶功能更加丰富,性能更加可靠,最终走向网联化与智能化,形成相互促进的正循环。以上就是我的全部介绍,谢谢大家。