对一类新型六自由度并联机器人机构的结构组成及其结构特性(包括 机构运动自由度计算,运动输出特性,运动学与动力学复杂性,输入-输出运动控制解耦性,驱动器可配置性等)进行了详细的分析,为其运动学和动力学分析,机 械结构设计及其在虚拟轴机床.

六自由度并联机构及其功能
原创 | 2022-10-10 18:17:53 |浏览:1.6万
猜你想问
-
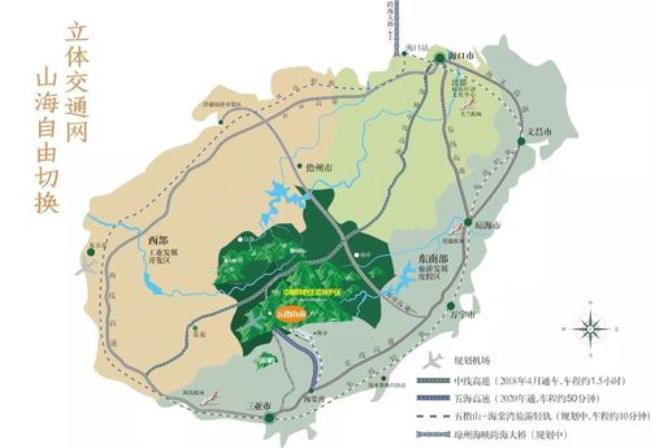 五指山的交通信息 公路 海南中线一带无机场和火车站,如需乘坐飞机,可到海口美兰国际机场或三亚凤凰机场;如乘坐火车,可至海口、三亚火车站,两站现都已开通到上海南、广州、北京西的空调...
五指山的交通信息 公路 海南中线一带无机场和火车站,如需乘坐飞机,可到海口美兰国际机场或三亚凤凰机场;如乘坐火车,可至海口、三亚火车站,两站现都已开通到上海南、广州、北京西的空调... -
 阴阳家成语典故 关于阴阳家的成语典故 “邹衍谈天”是一个成语,它比喻善辩。这个成语的出处是《史记·孟子荀卿列传》,这篇文章的作者是司马迁,司马迁在此文中记载了战国时期阴阳、...
阴阳家成语典故 关于阴阳家的成语典故 “邹衍谈天”是一个成语,它比喻善辩。这个成语的出处是《史记·孟子荀卿列传》,这篇文章的作者是司马迁,司马迁在此文中记载了战国时期阴阳、... -
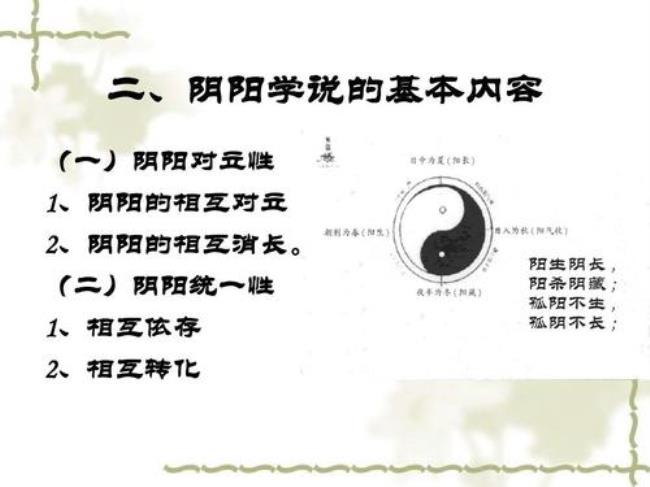 阴阳为什么能互相转化 首先是“阴阳转化”转化即转换、变化,指矛盾的双方经过斗争,在一定条件下走向自己的反面。阴阳转化,是指阴阳对立的双方,在一定条件下可以相互转化,阴可以转化为阳,阳可...
阴阳为什么能互相转化 首先是“阴阳转化”转化即转换、变化,指矛盾的双方经过斗争,在一定条件下走向自己的反面。阴阳转化,是指阴阳对立的双方,在一定条件下可以相互转化,阴可以转化为阳,阳可... -
 不知易不足以言太医什么意思 这是唐代孙思邈说的。易学在中国文化史上具有极为重要的作用,对于中医学的发展产生了十分深刻的影响,中国的历代著名医家都非常重视对于易学的研究工作。唐朝逊思邈...
不知易不足以言太医什么意思 这是唐代孙思邈说的。易学在中国文化史上具有极为重要的作用,对于中医学的发展产生了十分深刻的影响,中国的历代著名医家都非常重视对于易学的研究工作。唐朝逊思邈... -
 新泰市汶城实验小学怎么样 简介:新泰市汶城实验小学创建于1949年,时归属孙村煤矿,命名为职工子弟小学。1952年,孙村煤矿职工子弟小学更名为“新汶煤矿职工子弟小学”。1956年,建立新汶矿务局后,新...
新泰市汶城实验小学怎么样 简介:新泰市汶城实验小学创建于1949年,时归属孙村煤矿,命名为职工子弟小学。1952年,孙村煤矿职工子弟小学更名为“新汶煤矿职工子弟小学”。1956年,建立新汶矿务局后,新...