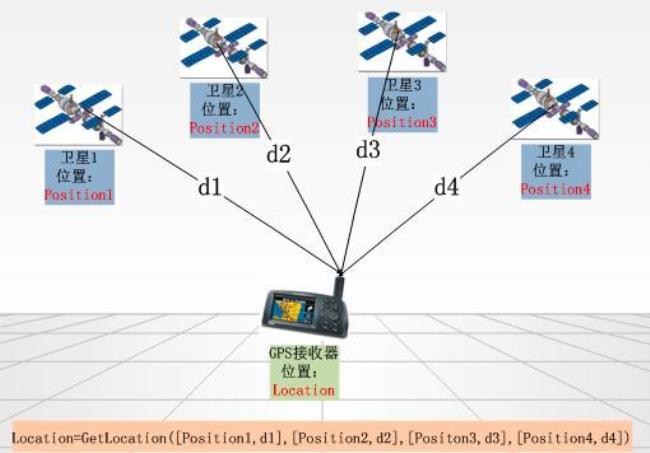
GPS系统定位的基本原理是利用测距交会确定点位。一颗卫星信号传播到接收机的时间只能决定该卫星到接收机的距离, 但并不能确定接收机相对于卫星的方向,在三维空间中,GPS接收机的可 能位置构成一个球面
当测到两颗卫星的距离时,接收机的可能位置被确 定于两个球面相交构成的圆上当得到第三颗卫星的距离后,球面与圆相 交得到两个可能的点第四颗卫星用于确定接收机的准确位置。因此,如 果接收机能够得到四颗GPS卫星的信号,就可以进行定位当接收到信号 的卫星数目多于四个时,可以优选四颗卫星计算位置。
扩展资料:
GPS全球定位系统采用多星高轨测距体制,以距离作为基本观测量,通过对4颗卫星同时进行伪距测量,即可推算出接收机的位置。由于测距可在极短的时间内完成,即定位是在极短的时间内完成的,故可用于动态用户。
现代测距实质上是使用无线电信号测量其传播时间来推算距离。可以测量往返传播延迟,也可以测量单程传播延迟。往返传播测距即主动测距,要求卫星与用户均具备收发能力。对用户来说,这不仅大大增加了仪器的复杂程度,而且从隐蔽性来看也是十分不利的,因为发射信号易造成暴露。单程测距(即被动测距)则在很大程度上避免了上述的缺点。
但单程测距要求卫星与用户接收机的时钟同步。如果两个时钟不同步,那么在所测量的传播延时时间中,除了因卫星至用户接收机之间距离所引起的传播延迟之外,还包含了两个时钟的钟差。要达到卫星与用户时钟同步,在实际工作中很难做到,但可通过适当方法解决。